研究内容
計測の自動化・高精度化・メカトロ要素
レーザー光平面を用いた三次元位置計測システムの開発
この研究は、安価で高速、高精度な位置、座標を計測するシステムを開発しています。 線状に拡散するレーザ光で平面を作り回転させ、3つの平面の回転角度から交点を求めます。 レーザ光発射装置を自由に設置できるようにするため、それぞれのレーザ光発射装置の位置や、 それらが作る平面に関しての情報は後から求める必要があります。 これらを求める作業をキャリブレーションといい、この精度が測定精度に影響します。 現在は、より精度の高いキャリブレーションの研究を行っています。
屋内外両方に対応した移動環境認識手法に関する研究
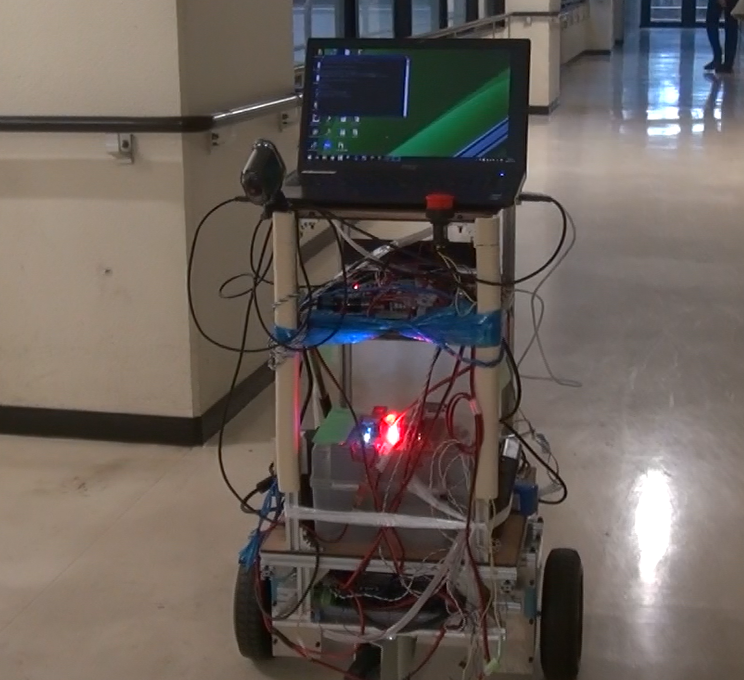
人と共存する移動サービスロボットを考えた場合、人と同様に屋内外を問わず移動できることが望まれます。 しかし屋外と屋内とでは環境条件が異なるため、一方で用いた手法がもう一方で用いれるとは限りません。 また各環境に個別に対処する場合その分だけ搭載するセンサ数が多くなり、コスト面で実用的ではありません。 そこで本研究では屋内及び屋外の両方に対応できる移動環境認識手法についての考案・開発を行います。
環境センサの統合と作業計画ナビゲーションに関する研究
この研究は、安価で高速、高精度な位置、座標を計測するシステムを開発しています。 線状移動ロボットにおいて、重要な要素として環境認識や自己位置推定、障害物回避があります。 これらを行うには様々な内界、外界センサが必要となり、また移動ロボットの種類によっては必要なセンサが異なります。 しかし、必要のないセンサ類を含め多くのセンサを取り付けるのは現実的ではありません。 これらの課題に対し柔軟に対応するために種々のセンサをモジュール化し使用を容易にし、効率化を図ることを目指しています。
インテリジェントエンコーダを用いた太鼓演奏装置の開発
エンコーダを用いた機械システムがより高精度な動作を行うためには、 エンコーダの高分解能化と高速応答化を果たす必要があります。しかし、高性能なエンコーダを機械システム上で用いると、 制御装置が処理すべき情報量が増大し、システム全体の動作に影響を及ぼすことが予想されます。 そこで本研究では、エンコーダ自身に情報処理機能を実装し、メイン制御装置の負荷を軽減させるとした、 制御装置の分散を行うことで問題の解決を図っています。 このエンコーダを中心とした自律制御システムをインテリジェントエンコーダと呼んでいます。 本研究では、このインテリジェントエンコーダを用いた機械システムの開発、 そして人間の演奏技法の再現や楽器の評価を行えるような高精度動作の演奏ロボットの開発を行っています。
プロフェッショナル・ロボティクス
楽器演奏ロボットMUBOT-ホルン演奏ロボットの開発
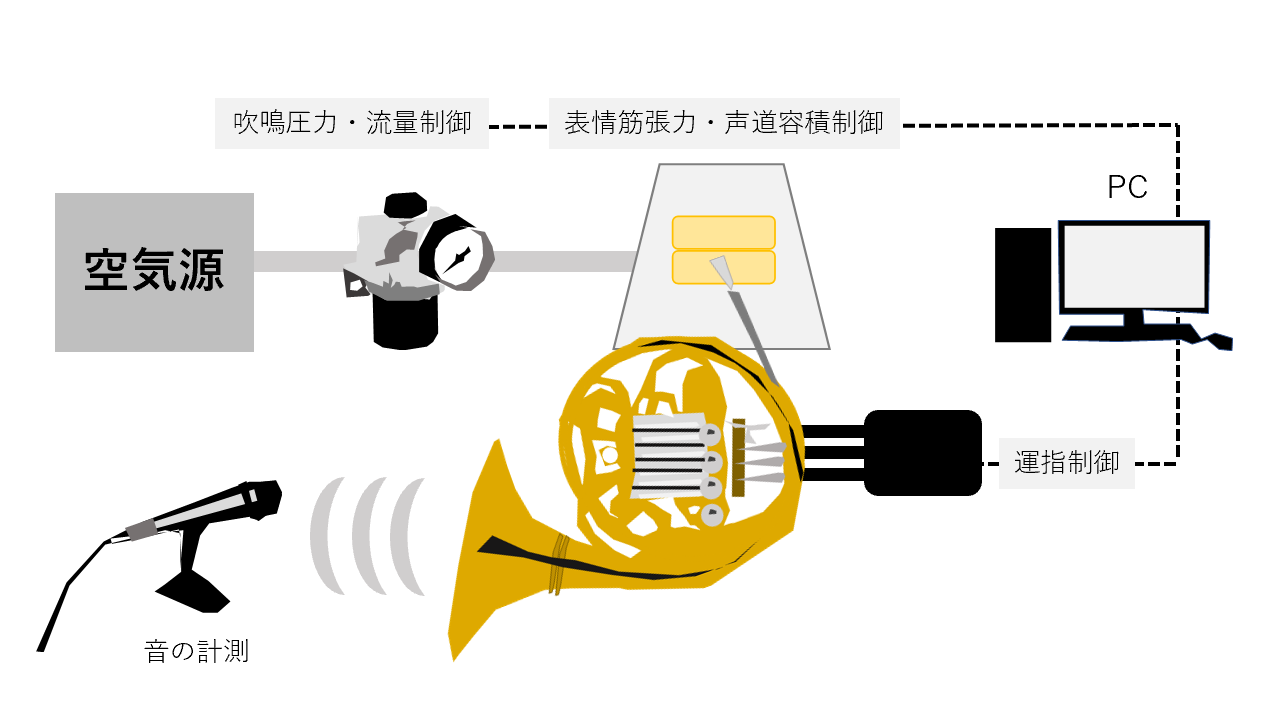
楽器演奏ロボット「MUBOT」とは、「楽器に一切手を加えない」という条件のもと、 演奏技法の解明や楽器の特性を評価するための演奏シミュレータ、そしてエンターテインメントロボットとしての利用を目指す研究プロジェクトです。これまでに、リコーダ、ヴァイオリン、チェロ、シンセサイザの合奏システムや、和太鼓演奏ロボット、エレキベース演奏ロボットの開発を行ってきました。この度、金管楽器、ホルンを対象とした新しいプロジェクトが始まります。金管演奏者は、演奏音を様々な要素で制御しています。具体的には、1)吹鳴圧力制御、2)流量制御、3)声道の容積制御、4)表情筋の張力制御などが挙げられます。しかしながら、これらの制御と演奏音との関連性は明らかになっておらず、現在も感覚的な楽器教育が行われています。そこで本研究では、これらの制御要素で構成されるロボットを開発し、演奏時の動きと音高、音量、音色の関係を解明することを目的としています。
回り階段も移動可能な直交4脚車輪ロボットの開発
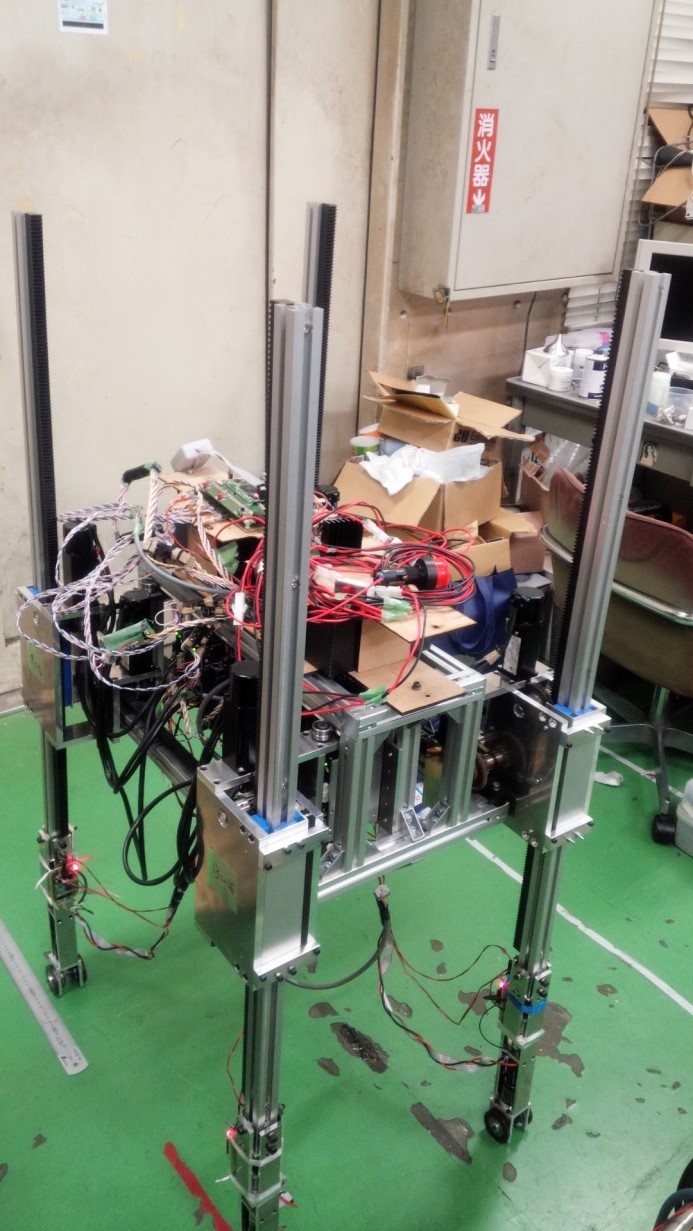
近年、共働き世帯の増加や少子高齢化の進行に伴い、ロボットによる家事作業の支援が求められています。 ロボットが家事を遂行するためには、家事そのものを行う機能とともに、 家屋内を移動する機能も必要となります。 しかし、家屋内には様々な敷居や階段等が存在し、ロボットはこれらの不整地に対応して移動しなければなりません。 中でも階段は連続した不整地であり、移動が非常に困難です。 さらに、日本の一般家屋に多く見られる途中で折れ曲がっている階段、 所謂「回り階段」を移動することも要求されますが、 回り階段を移動することはまっすぐな階段を移動するよりも困難です。 以上を踏まえ、本研究では家事作業支援を念頭においた家屋内移動ロボットの開発を目的としています。 そこで、回り階段も移動可能な「直交4脚車輪ロボット」を開発し、その歩容や動作について実験・検証を行っています。
家庭用双腕サービスロボットの開発

近年、高齢化や共働き世帯の増加により、家庭内において家事作業を行うサービスロボットの必要性が高まってきています。 近年開発されている双腕ロボットは産業向けのものが多く、 ホンダのASIMOや産業技術総合研究所が開発しているHRP4-Cのような家庭での使用を目的としたものは未だ開発中であり、 実際に開発されたとしても非常に高価です。 そこで、本研究では炊事・洗濯・掃除といった家事機能を有し、 できるだけ安価な家庭用双腕サービスロボットの提案を行い、これを開発します。
スポーツロボットに関する研究

弓矢の歴史は長く、近年では、弓道・アーチェリーというスポーツ競技として、 その様式が洗練されてきています。特に、アーチェリーにおいて、 新素材や新機構の導入によって弓の発射性能が飛躍的に高まってきました。 一方で、飛翔体である矢の研究、特にその空力特性に主眼をおいた科学的な研究はあまり行われていません。 人間が弓具を用いて発射すると、飛翔している矢は、とても複雑な運動をします。 それは、矢が矢羽の空力効果によって矢軸周りに回転するだけでなく矢自体がたわみ振動するためです。 これまでに、矢のたわみ振動を起こさない状態での矢の飛翔は再現できています。 次の段階として、人間と同様にたわみ振動を起こしながら矢を飛翔させることが可能な実験装置が必要です。 本研究では実際の選手が使用する道具を用いてシューティングが可能なアーチェリーロボットを設計試作し、 スポーツシミュレータとしての機能拡充(シューティング精度、たわみ振動の制御)に向けて実験・評価を行っています。
球体変形移動ロボットの開発
近年、災害現場や惑星探索などにおいて、効率よく移動し情報収集するためのロボットの需要が高まっています。 本研究では球体型のロボットに着目し、ロボットの製作及び移動の安定性向上、カメラを用いた自律移動システムの構築などを目指しています。
安心・安全センサに関する研究
この研究では、個室空間でヒトが安心・安全に活動できる環境を提供するセンサシステムの開発をしています。 これ以前の研究は、ヒトとロボットが同じ空間で作業する際に、ロボットの動作範囲への侵入を検知するような安全センサの開発でした。 これが発展し、ロボットのいる空間に限らず個室空間で発生する様々な問題を解決するためのセンサ開発が目的となっています。例えば、ヒトの倒れこみや危険物の放置、不審行動などの検知がこれに当たります。