金森研究室
電気通信大学
情報理工学域 2類(融合系) 先端ロボティクスプログラム
大学院 情報理工学研究科 機械知能システム学専攻
お知らせ
【重要】2026年度金森研卒研配属に関するご案内
来年度、金森研を希望する学生は特設サイトをご確認ください
※閲覧するにはUECクラウドアカウントが必要です
金森研究室とは
本学メカトロニクス研究室の出身である教授金森のもと、
2005年4月にスタートした研究室です。
これまでに実践的な課題および問題解決に従事し、
多数の共同研究プロジェクトにも参加してきました。
専門は、計測制御システム及びロボット・メカトロニクスシステムの開発です。
計測、処理、制御の要素を持つメカトロニクス技術を用い、
実践的な課題の解決を目指したシステムを開発します。
技術要素
研究内容
安心・安全センサに関する研究
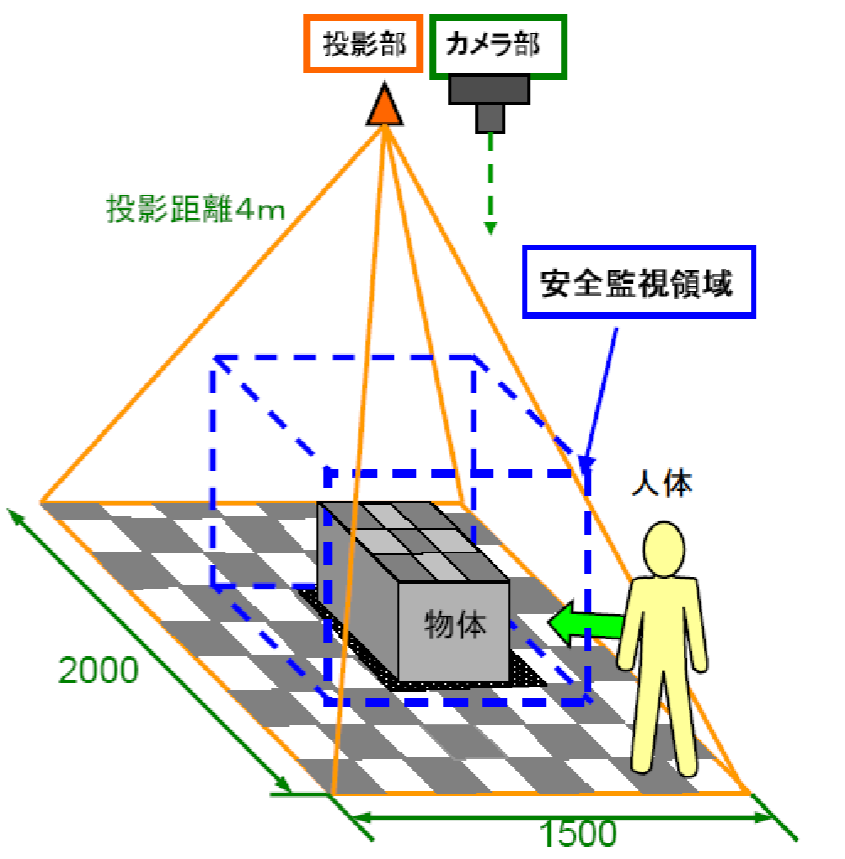
この研究では、個室空間でヒトが安心・安全に活動できる環境を提供するセンサシステムの開発を行っています。ヒトとロボットが同じ空間で作業する際に、ロボットの動作範囲への侵入を検知する安全センサの開発から始まり、現在はあらゆる個室空間において利用者の行動をセンシングするシステム開発を行っています。
技術分野としては主に画像処理、点群処理など各種センサを活用したマルチモーダルな機械学習、深層学習処理を行い、実践的なシステムにつなげています。
食品ハンドリング/搬送ロボットに関する研究
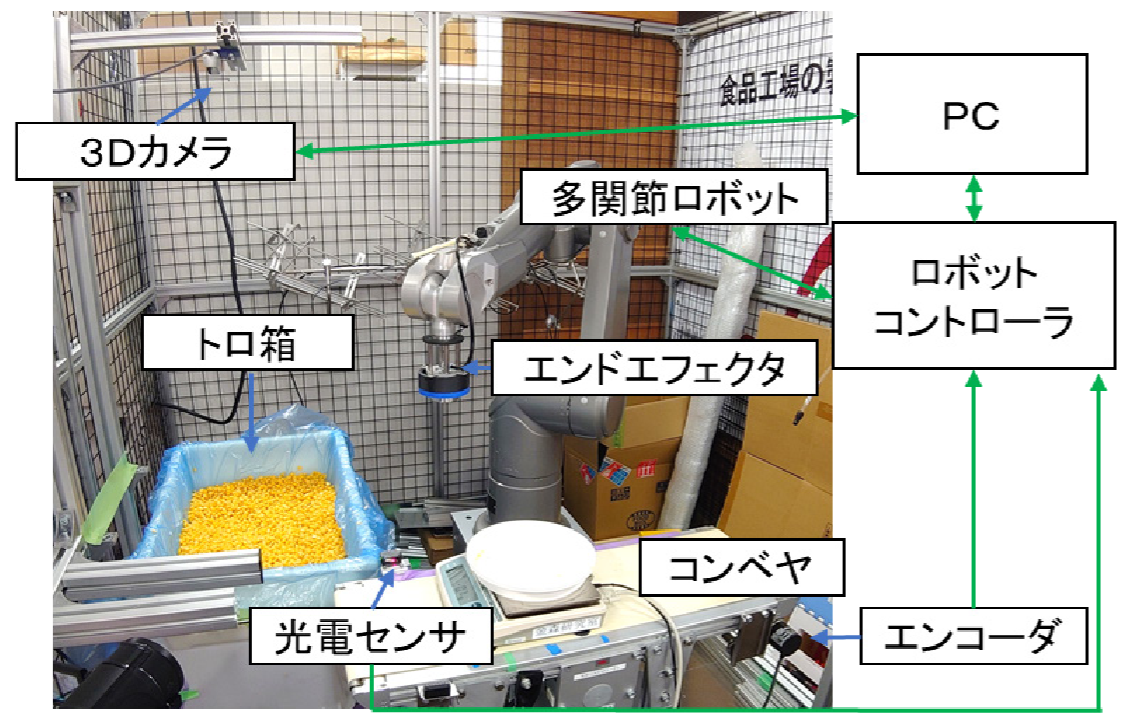
少子高齢化による労働力不足により、工場においては作業の自動化が求められています。しかし、食品製造の自動化においては、対象物が不揃いかつ柔らかく崩れやすいという特性や、衛生条件といった壁が存在します。本研究室ではこれらの条件に適した新たなエンドエフェクタの研究開発を行っています。
楽器演奏ロボットMUBOT - エレキベース演奏ロボットの開発
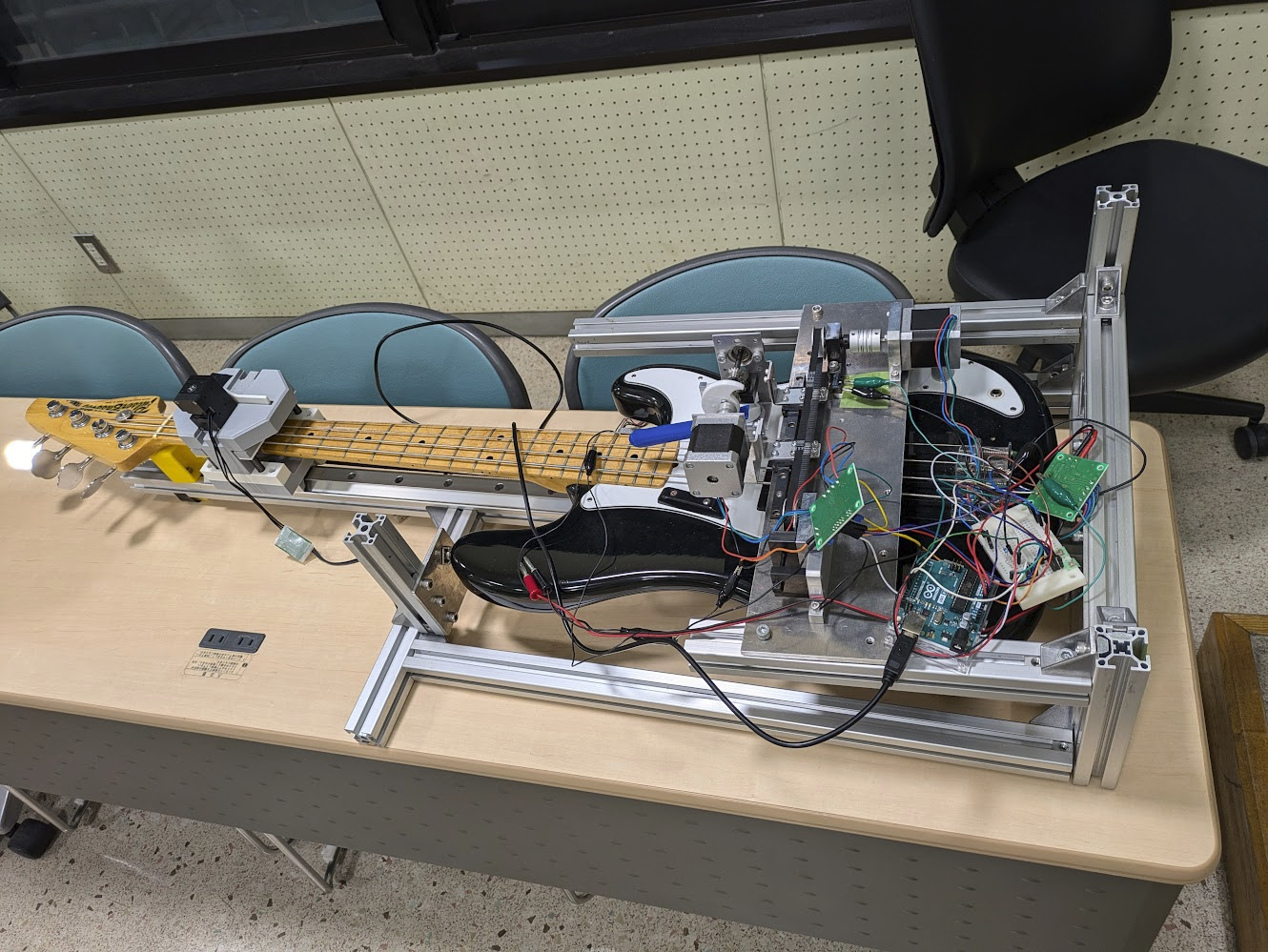
楽器演奏ロボット「MUBOT」とは、「楽器に一切手を加えない」という条件のもと、 演奏技法の解明や楽器の特性を評価するための演奏シミュレータ、そしてエンターテインメントロボットとしての利用を目指す研究プロジェクトです。これまでに、リコーダ、ヴァイオリン、チェロ、シンセサイザの合奏システムや、和太鼓演奏ロボットの開発を行ってきました。
本研究ではスラップ奏法と呼ばれるエレキベースの演奏手法に着目し、人間の奏法を再現するロボットの開発に取り組みました。
楽器演奏ロボットMUBOT - ホルン演奏ロボットの開発
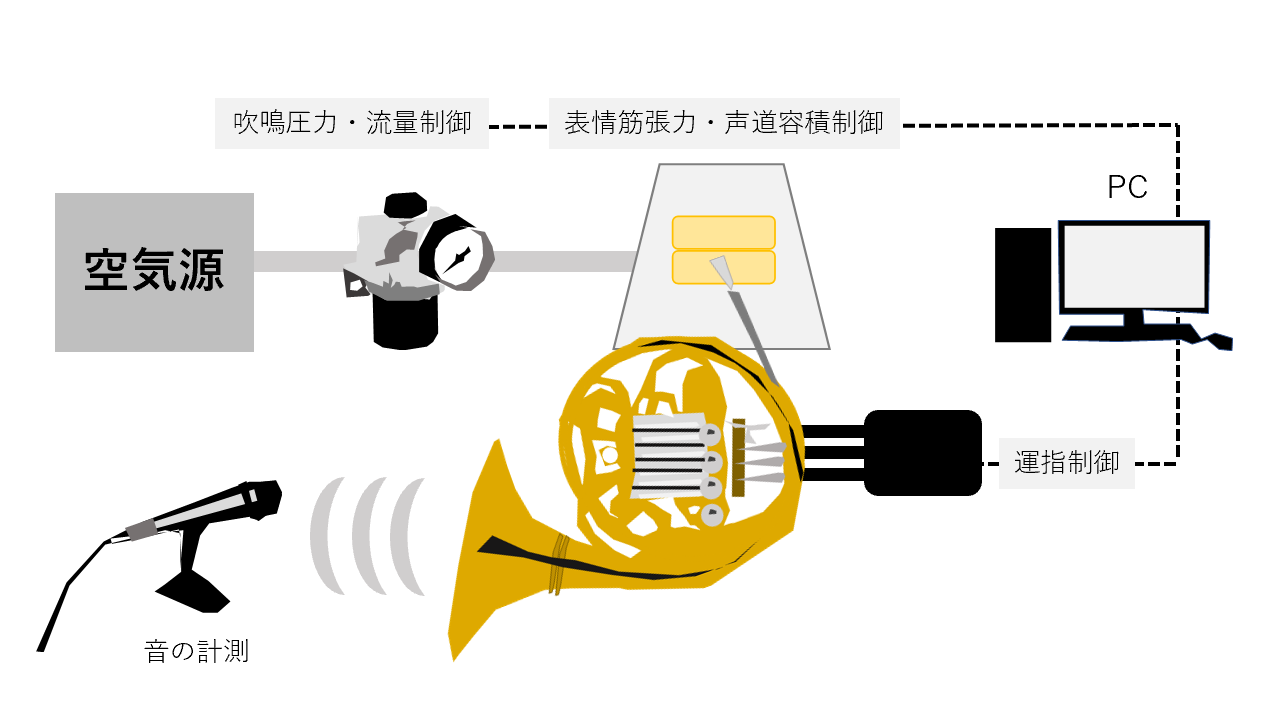
金管演奏者は、演奏音を様々な要素で制御しています。具体的には、1)吹鳴圧力制御、2)流量制御、3)声道の容積制御、4)表情筋の張力制御などが挙げられます。しかしながら、これらの制御と演奏音との関連性は明らかになっておらず、現在も感覚的な楽器教育が行われています。そこで本研究では、これらの制御要素で構成されるロボットを開発し、演奏時の動きと音高、音量、音色の関係を解明することを目的としています。
回り階段も移動可能な直交4脚車輪ロボットの開発
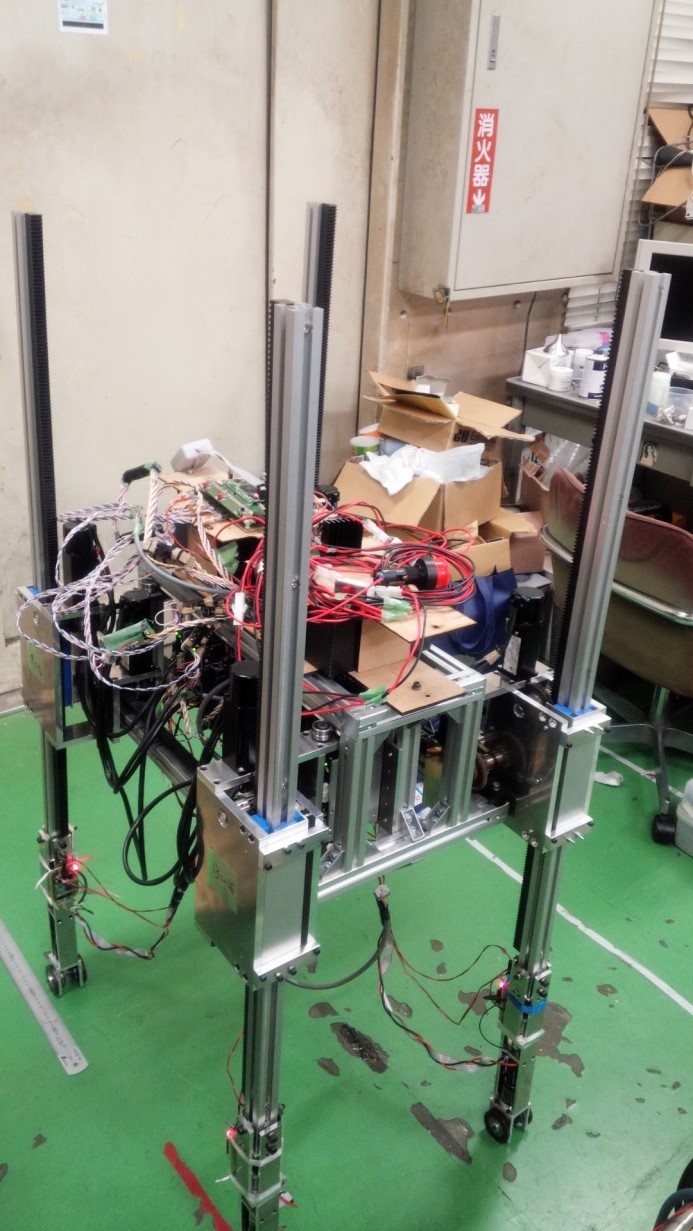
近年、共働き世帯の増加や少子高齢化の進行に伴い、ロボットによる家事作業の支援が求められています。 ロボットが家事を遂行するためには、家事そのものを行う機能とともに、 家屋内を移動する機能も必要となります。
しかし、家屋内には様々な敷居や階段等が存在し、ロボットはこれらの不整地に対応して移動しなければなりません。 中でも回り階段は連続した不整地かつ曲がり道であり、移動が非常に困難です。本研究では回り階段も移動可能な「直交4脚車輪ロボット」を開発し、その歩容や動作について実験・検証を行いました。
家庭用双腕サービスロボットの開発

近年、高齢化や共働き世帯の増加により、家庭内において家事作業を行うサービスロボットの必要性が高まってきています。近年開発されている双腕ロボットは産業向けのものが多く、家庭での使用を目的としたものは未だ研究段階にとどまっています。 そこで、本研究では炊事・洗濯・掃除といった家事機能を有する家庭用双腕サービスロボットの提案を行いました。
スポーツロボットに関する研究

弓矢の歴史は長く、近年では、弓道・アーチェリーというスポーツ競技として、その様式が洗練されてきています。特に、アーチェリーにおいて、新素材や新機構の導入によって弓の発射性能が飛躍的に高まってきました。その一方で、飛翔体である矢の研究、特にその空力特性に主眼をおいた科学的な研究はあまり行われていません。
本研究では実際の選手が使用する道具を用いてシューティングが可能なアーチェリーロボットを設計試作し、スポーツシミュレータとしての機能拡充(シューティング精度、たわみ振動の制御)に向けて実験・評価を行いました。
球体変形移動ロボットの開発
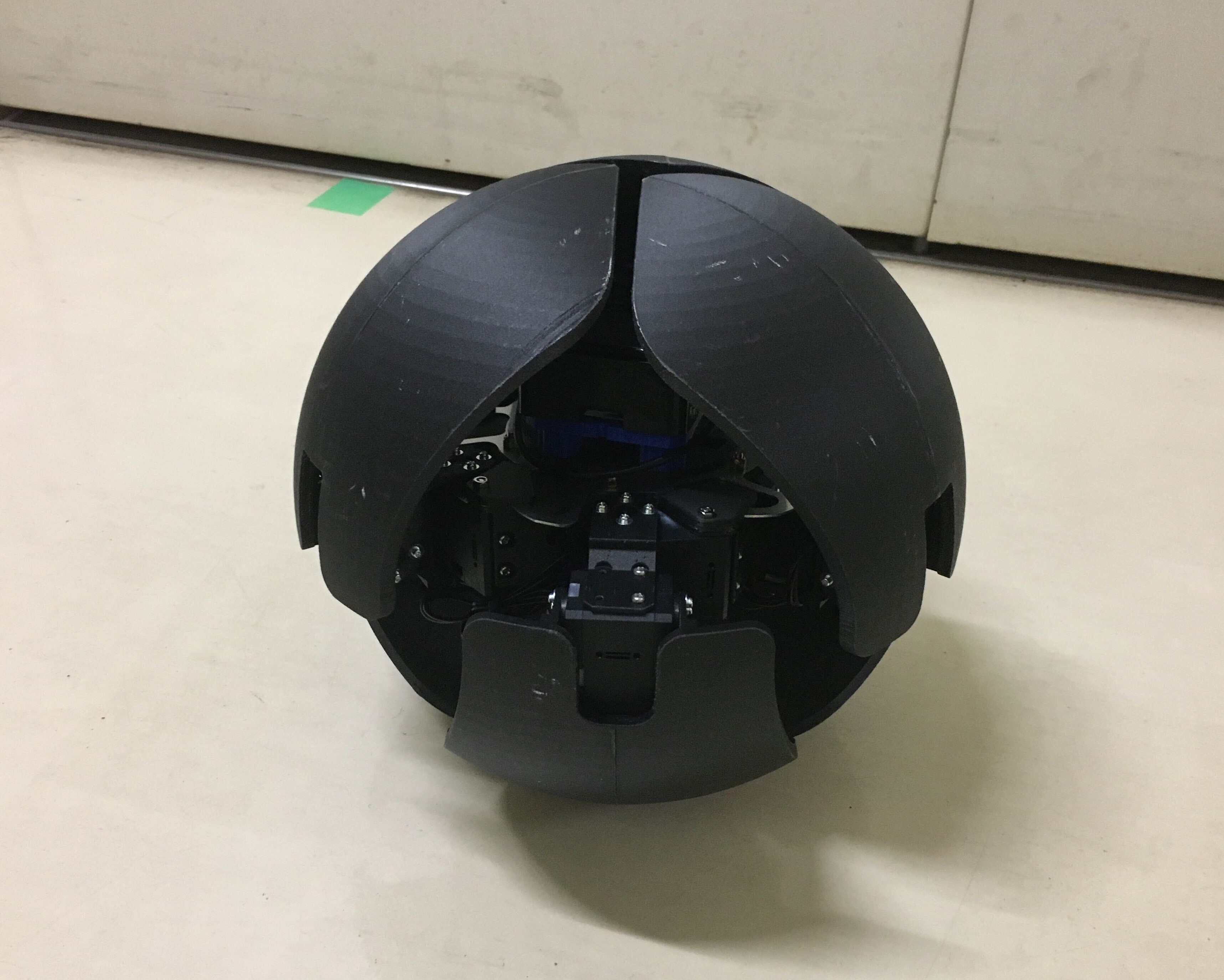
近年、災害現場や惑星探索などにおいて、効率よく移動し情報収集するためのロボットの需要が高まっています。本研究では球体型のロボットに着目し、ロボットの製作及び移動の安定性向上、カメラを用いた自律移動システムの構築を目指しました。
屋内外両方に対応した移動環境認識手法に関する研究
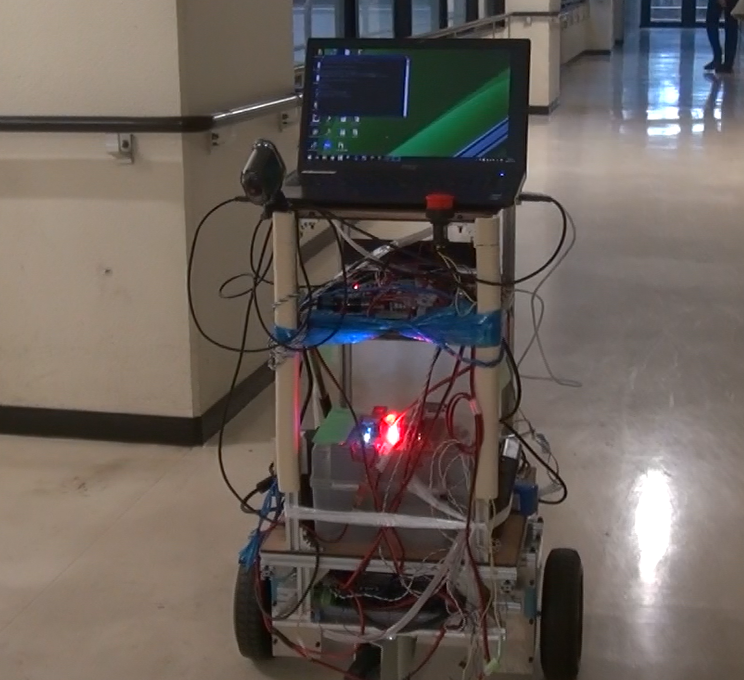
人と共存する移動サービスロボットを考えた場合、人と同様に屋内外を問わず移動できることが望まれます。しかし屋外と屋内とでは環境条件が異なるため、一方で用いた手法がもう一方で用いれるとは限りません。また各環境に個別に対処する場合その分だけ搭載するセンサ数が多くなり、コスト面で実用的ではありません。そこで本研究では屋内及び屋外の両方に対応できる移動環境認識手法についての考案・開発を行いました。
レーザー光平面を用いた三次元位置計測システムの開発
この研究は、安価で高速、高精度な位置、座標を計測するシステムを開発しました。線状に拡散するレーザ光で平面を作り回転させ、3つの平面の回転角度から交点を求めます。
メンバー
| 役職 | 名前 | 専門 |
|---|---|---|
| 教授 | 金森 哉吏 | 計測制御システム及びロボットシステムの開発 |
| 学年 | 名前 | 研究テーマ |
|---|---|---|
| D1 | 峻葳 | 強化学習によるロボットの力制御に基づく変形可能なオブジェクトの組み立て |
| M2 | 谷口 | (非公開) |
| M2 | 盛田 | 水害時における床下の土砂撤去ロボット |
| M1 | 栗末 | (非公開) |
| B4 | 赤崎 | 水たまり除去ロボットの開発 |
| B4 | 内川 | 未定 |
| B4 | 加藤 | 地面に落ちている枝葉を回収するモジュールの開発 |
| B4 | 永井 | 水害時における床下の土砂撤去ロボット |
| B4 | 山口 | 電磁加速装置を用いたリニアアクチュエータの開発 |
アクセス
金森研究室
金森 哉吏 教授
東4号館3階303室
Tel 042-443-5428
Fax 042-484-3327 (学科事務室)
E-mail kanamori@mce.uec.ac.jp
学生部屋
東4号館3階301室